



Featured Projects




Example design with XMotion V3 board and Bluetooth Control
In this example, we will direct the robot with an APP running on Android (Arduino Car application) using the XMotion V3 control card and Bluetooth Module (HC-06). The new version of the XMotion control board has a direct socket for Bluetooth. In this way, we can make a practical connection with the HC-06 Bluetooth model. [...]

XMotion Mini Sumo Robot User Input Debug Codes (Button, Dipswith and Start Module)
The codes below will allow you to Debug while developing a project with XMotion. Button & Dipswitch Debug /* JSumo Mini Sumo Robot Code * Model Type: Black Magic * Dipswitch & Button DEBUG CODE */ //// DipSwitch Pin Definitions //// #define DipSwitch1 5 #define DipSwitch2 6 #define DipSwitch3 7 //// Button Pin Definition //// [...]
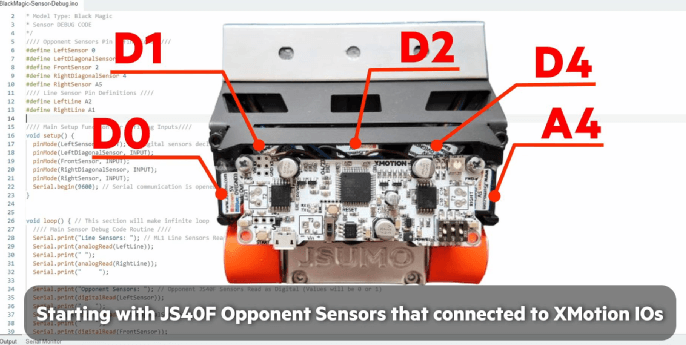
Sensor Debug for Black Magic Mini Sumo Robot
The code below is the sensor debug code for black magic. While building the robot, we load this type of code and control the sensors. If the sensors do not work correctly, it will affect the operation of the entire robot. /* JSumo Mini Sumo Robot Code * Model Type: Black Magic * Sensor DEBUG [...]

XS1 Micro Sumo Arduino Code & Explanation of the Robot code
In that article I will share our new microsumo robot kit’s Arduino code. But before sharing code I want you to fully understand its logic, its system. For that we will go slowly. Let’s look to hardware side of robot and try to understand. The main idea of this article is understanding the concepts for […]

ShadowSumo V1 (WIP) // KTU Robotics
How I made my mini-sumo robot “ShadowSumo” You might notice that this Mini Sumo is WIP. That’s because I think all robots should always be a work in progress and constantly upgraded/modified. When I make more significant changes, I will make new articles, so please follow jsumo blogs. More minor changes will be mentioned at […]

Federal M.T. | Team Uai!rrior
Robot and Team Name Robot: Federal M.T. Team Name: Team Uai!rrior When you build? And Duration of progress Federal M.T. was built in 2012 and it took around three months to set it. We put together the project from Autodesk Inventor, the electronic boards made on Altium Designer all together in our workshop, with the […]

Stonehenge Robot – ThundeRatz Team
Robot and Team Name Robot: Stonehenge – Team Name: ThundeRatz When you build? And Duration of progress The first project was made in 2012 and it took 1 year, but the newest version was made in 2016 and it took 1 year too. What was the hardest part you achieved? Reduction gears wore out quickly, […]

Arduino Line Follower Robot Assembly Guide
Line follower robots (line tracing robots) are a type of robot we recommend for introduction to robotics. It is easy to assemble but difficult to develop. In this article, we will discuss the assembly and explain how to assemble the robot kit. We will also cover how to test the line follower robot.

Line Follower // Quantum Bits
Robot and Team Name Line Follower, Quantum Bits When you build? And Duration of progress In this sumer, it takes 2 weeks. What was the hardest part you achieved? The programing. As it is my first robot.

WolfBotz Mini Sumo Robot – IEEE CEFET/RJ
Robot and Team Name The robot’s name is Maiara from WolfBotz which is part of the Student Branch IEEE CEFET/RJ When you build? And Duration of progress We started building in January 2019 and finished in May 2019, it took 4 months of work. However, it’s continuously upgraded and improved. What was the hardest part […]